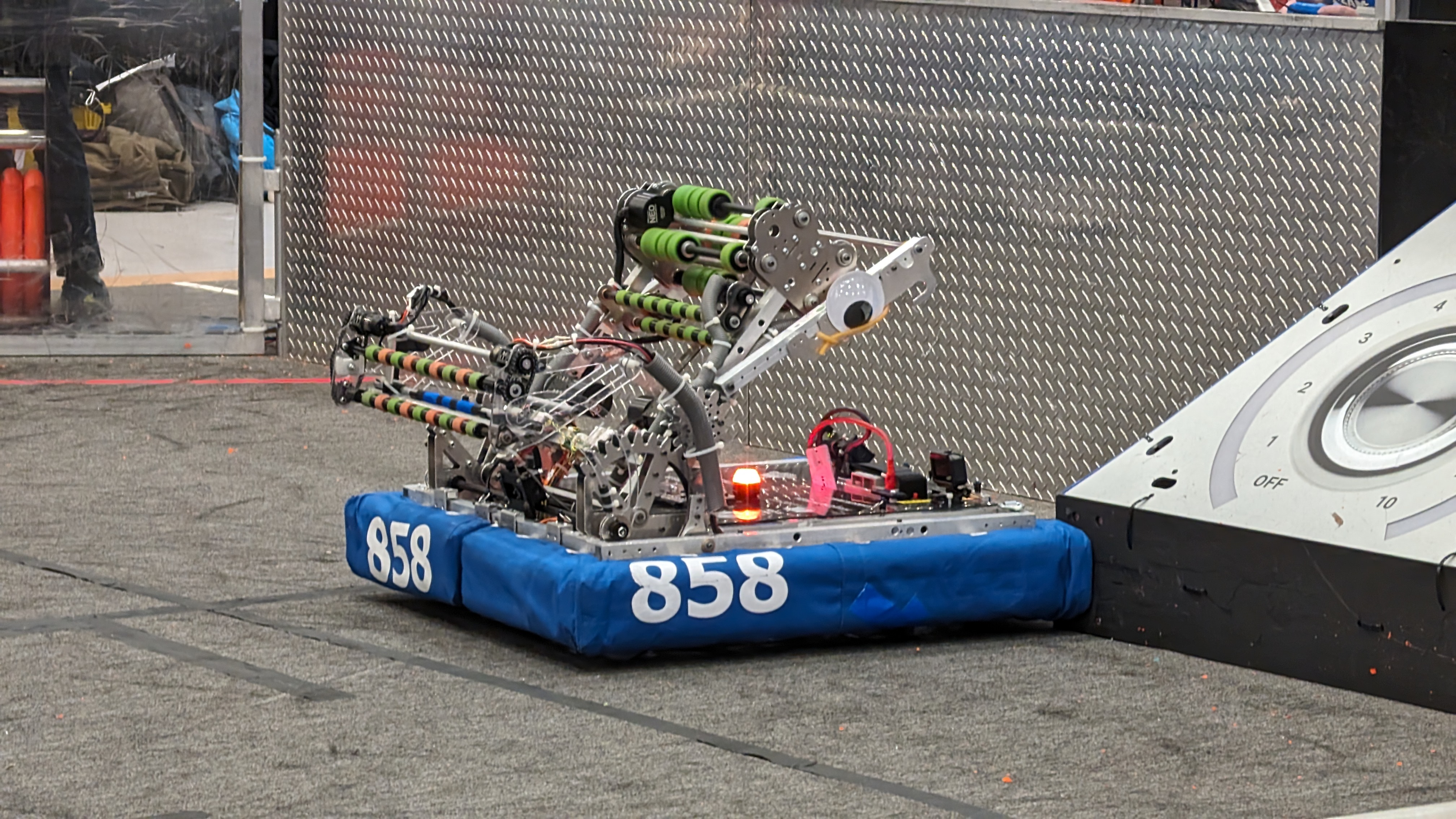
2024 - Crescendo
Discription
| Drive Type | Swerve Drive |
| Game Element Effector | 4 Bar note intake, with adjustable launcher that hangs on the chain. |
| Coded In | Java |

Discription
| Drive Type | Swerve Drive |
| Game Element Effector | 4 Bar note intake, with adjustable launcher that hangs on the chain. |
| Coded In | Java |

This robot has been built with every task in mind. We are able to reach to all levels, pick up from any human player station. Low center of gravity allows are robot to drive fast. Our cameras center the robot on each target, and LEDs to communicate to the human player.
| Drive Type | Swerve Drive |
| Game Element Effector | Cone and cube pickup. Swivel and extension arm. |
| Coded In | Java |
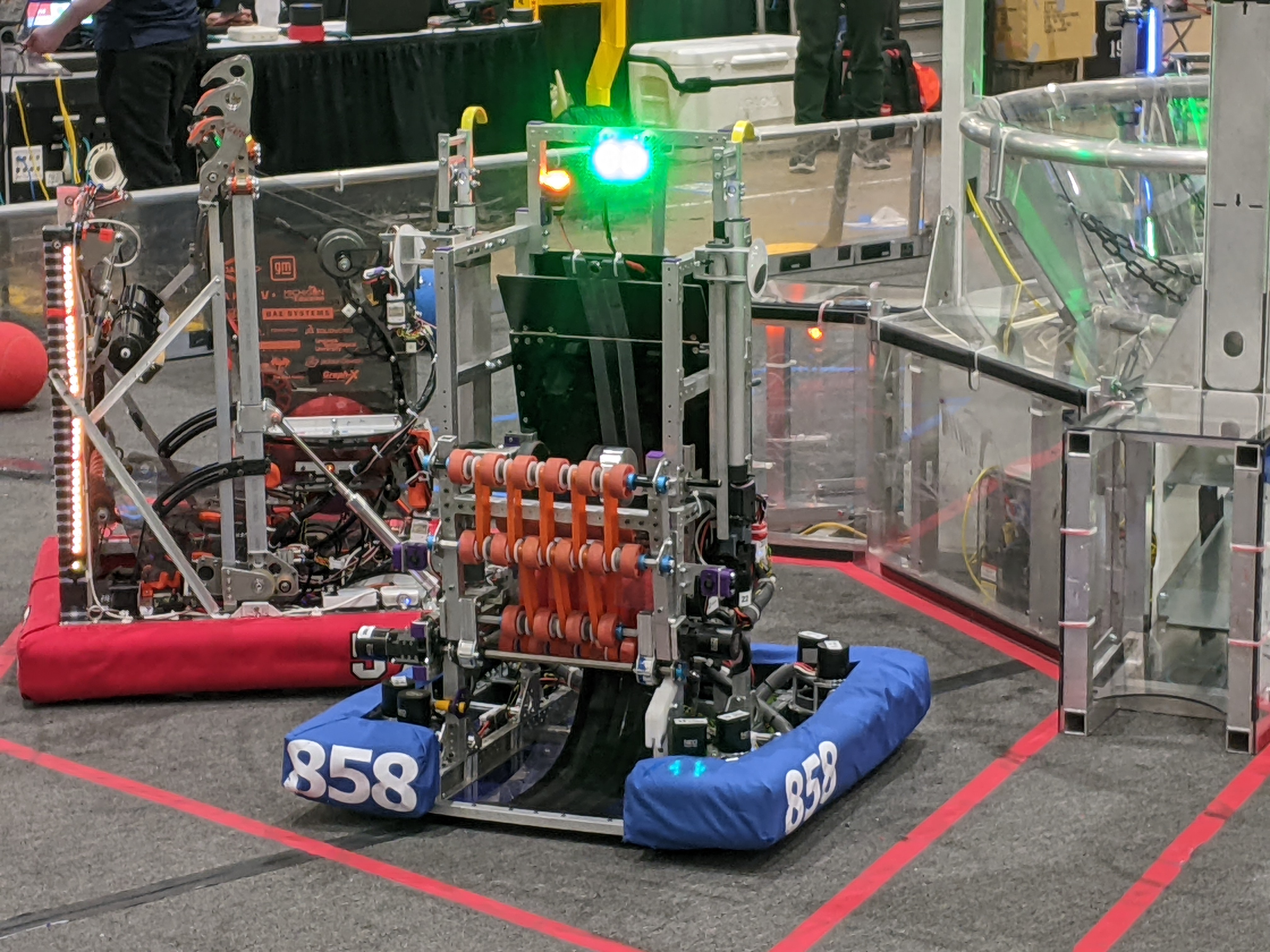
Our first year using swerve drive. We also used a camera to calculate the distance and position of center goal.
| Drive Type | Swerve Drive |
| Game Element Effector | Cargo pickup mechanism, camera guided launcher, and climbing mechanism |
| Coded In | Java |
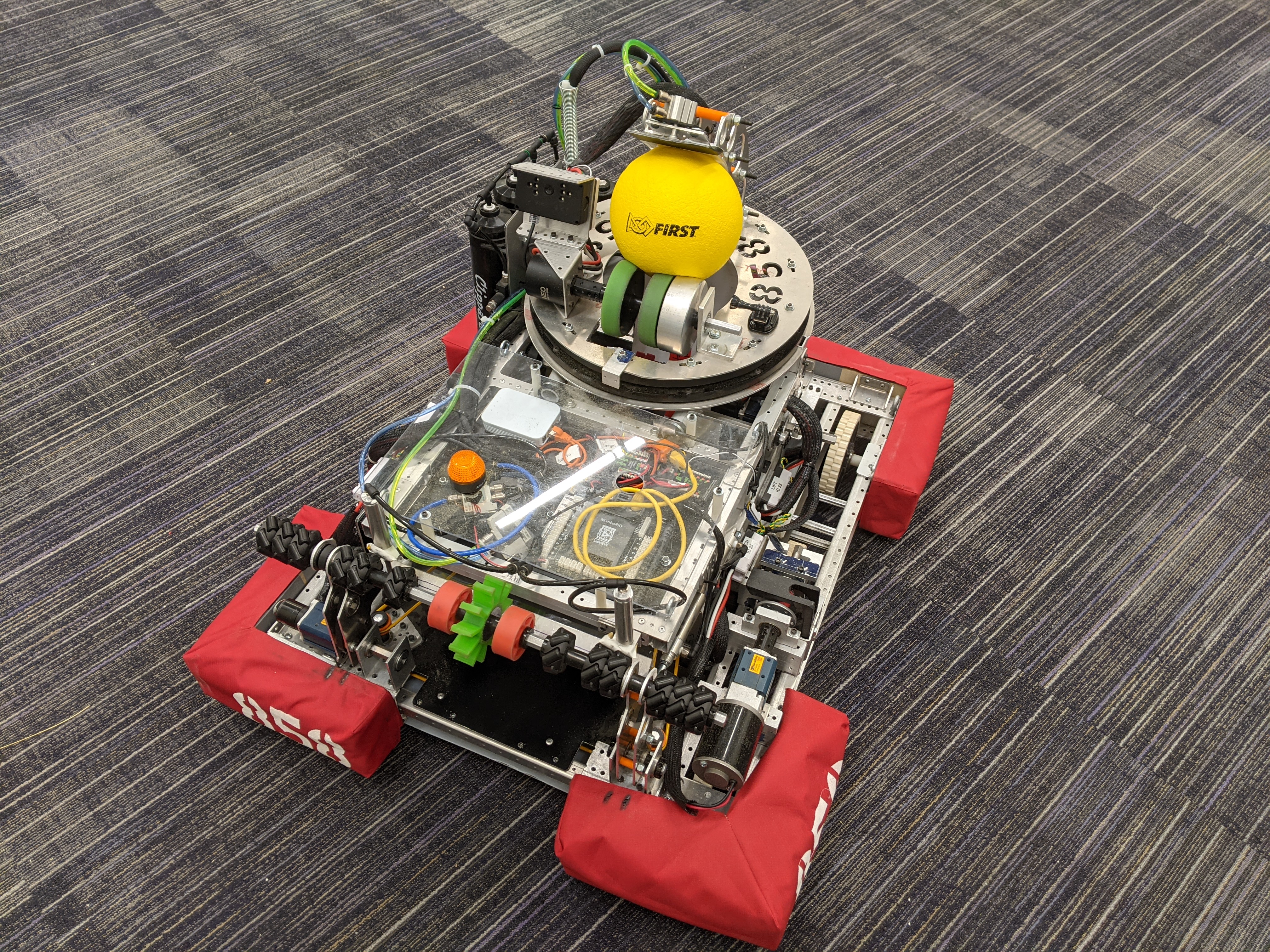
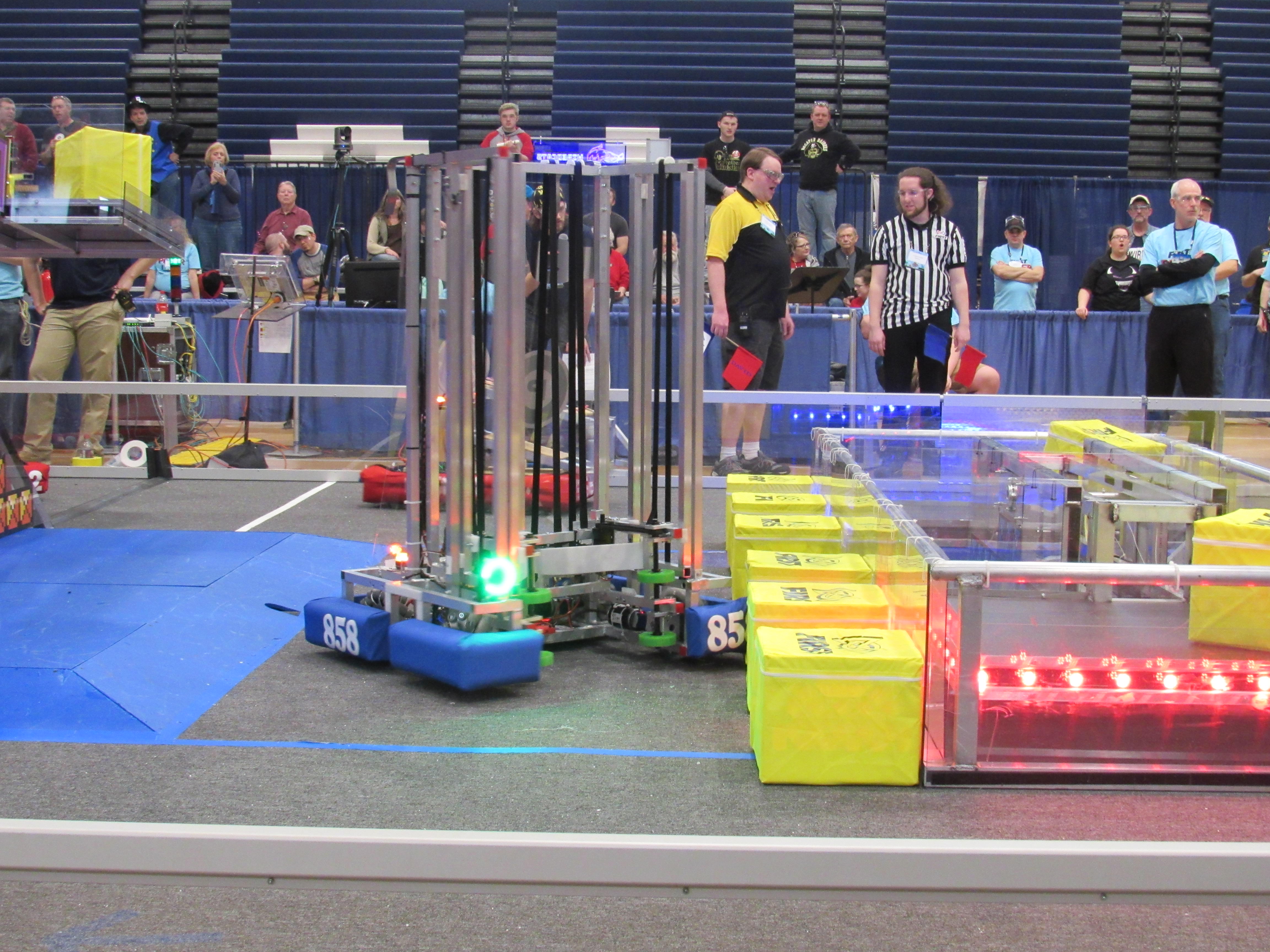
This robot can rapidly pickup powercells. With a camera guided turret the robot estimates the distance and direction of the target and lunches accurately.
| Drive Type | 6 Rubber Wheel |
| Game Element Effector | Powercell (Yellow Ball) pickup mechanism and camera guided turret |
| Coded In | Java |
This robot was tasked to collect Cargo Pods/Hatches and dispense them into the rocket ships.
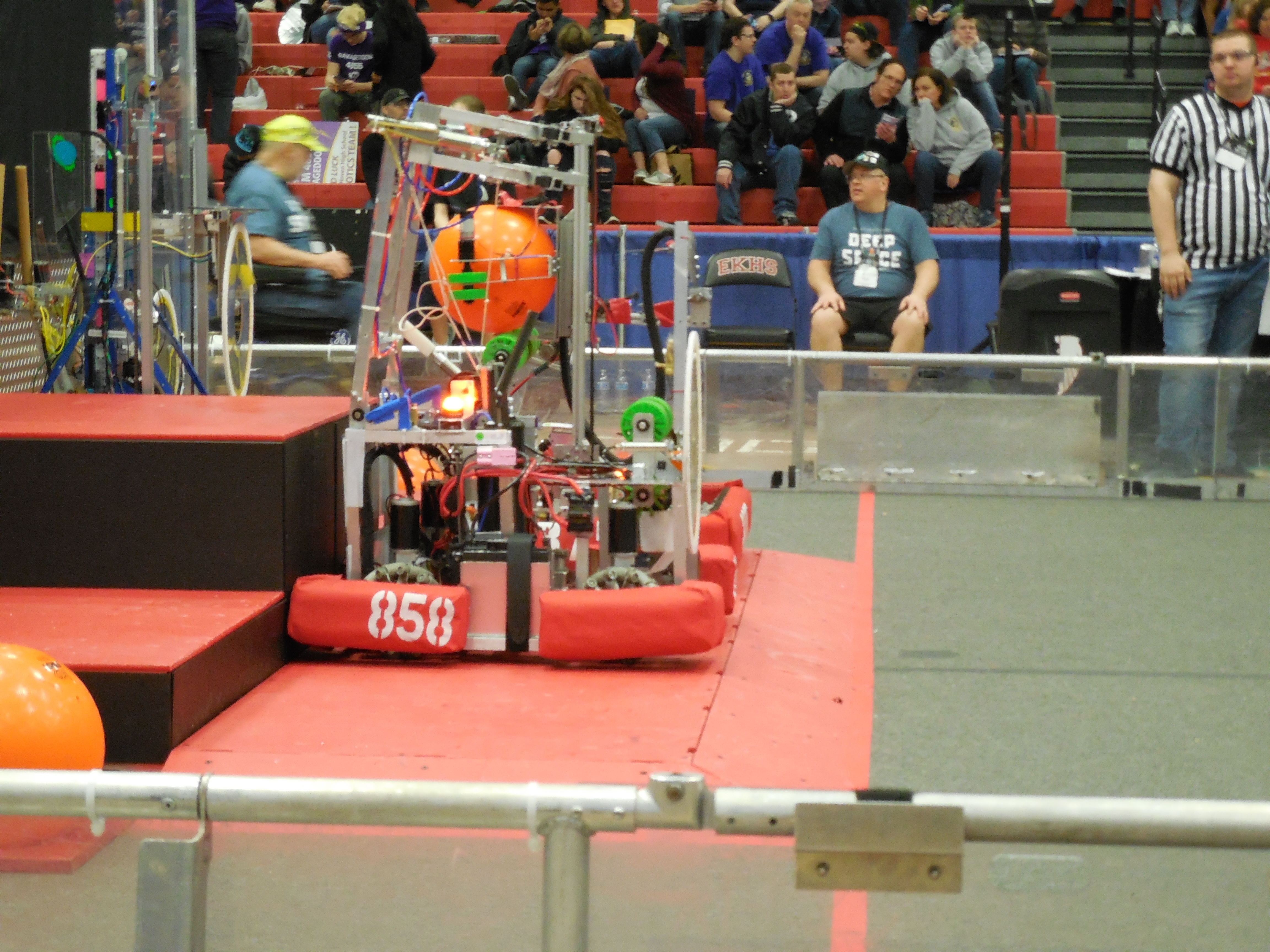
| Drive Type | Mecanum Wheels |
| Game Element Effector | Cargo Pickup and Luncher, Hatch dispenser, HAB climber. |
| Coded In | Java |
Moving boxes and climbing to face the boss. This robot was built to suit these tasks
| Drive Type | Mecanum Wheels |
| Game Element Effector | Box Mover and Climber |
| Coded In | Java |
Quickly dumping balls and climbing up a rope. This robot could do it all.
| Drive Type | Octocanum-Drive (Rubber wheels and Drop down Mecanum Wheels) |
| Game Element Effector | Ball Dump and Gear Holder |
| Coded In | Java |
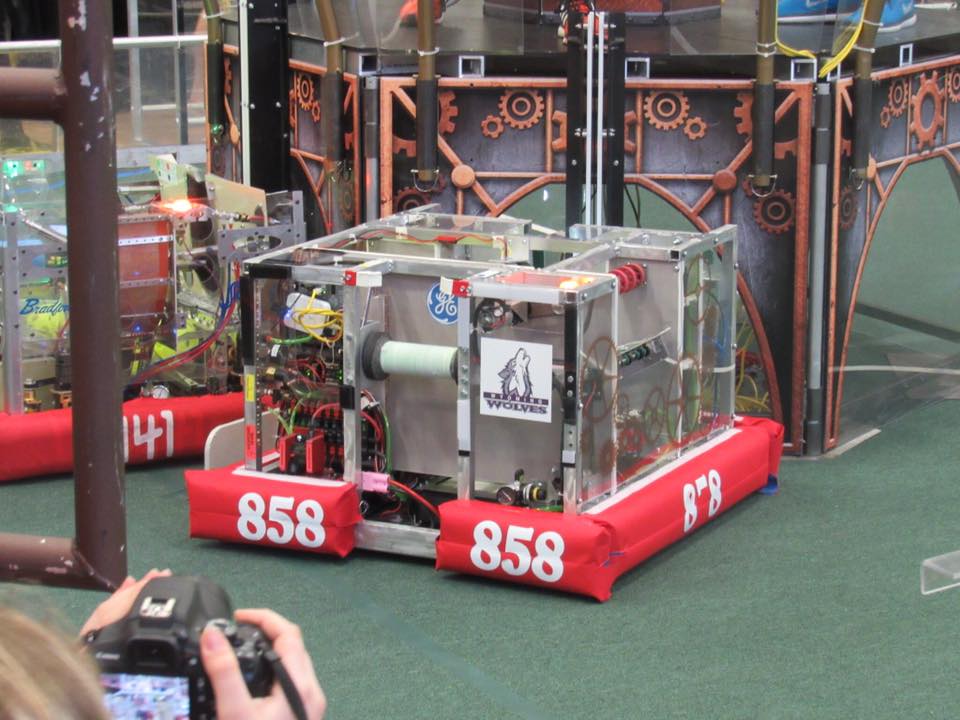
This robot wanted to see more than just michigan, It won us to nationals. This versatile robot had an listing arm to move things and a pop-up ball luncher to get the boulders in the castle.
| Drive Type | Tank Tred |
| Game Element Effector | Arm to get though defences and Ball Luncher |
| Coded In | Java |

This robot had a good robust yet simple design. It had and award winning over-engineered ball luncher.
| Drive Type | Mecanum |
| Game Element Effector | Forklift Elevator |
| Coded In | Labview (Graphical C++) |

This robot had a good robust yet simple design. It had and award winning over-engineered ball luncher.
| Drive Type | 6 Rubber Wheel |
| Game Element Effector | Arm Pick up and Luncher |
| Coded In | Labview (Graphical C++) |

Frisbee Bot, This robot had to launch frisbes. Using its yellow horns it could align its shot almost perfect everytime. Loading the frisbes from the hunman player was the fastest known way to get frisbes and rush back to unlnoad them. Lots of people came up with difficullt designs to climb the perimade. We desided on the horns. Not to mention that we could still lunch frisbes whilst hanging.
| Drive Type | 6 Rubber Wheel |
| Game Element Effector | Frisbe Luncher |
| Coded In | Labview (Graphical C++) |

This robot could loadup and despense balls fast. Being one of our only wide rather than long robots. This was designed to fit on that ramp with a little help from the support air cylinder.
| Drive Type | 4 Wheel Infladed Tube |
| Game Element Effector | Belt Intake and Wheel Compreshion Luncher |
| Coded In | Labview (Graphical C++) |

This robot was simple. Just lift the tubes and place it on the goal.
| Drive Type | 6 Wheel Tracktion Tred |
| Game Element Effector | Parallel Lift |
| Coded In | Labview (Graphical C++) |

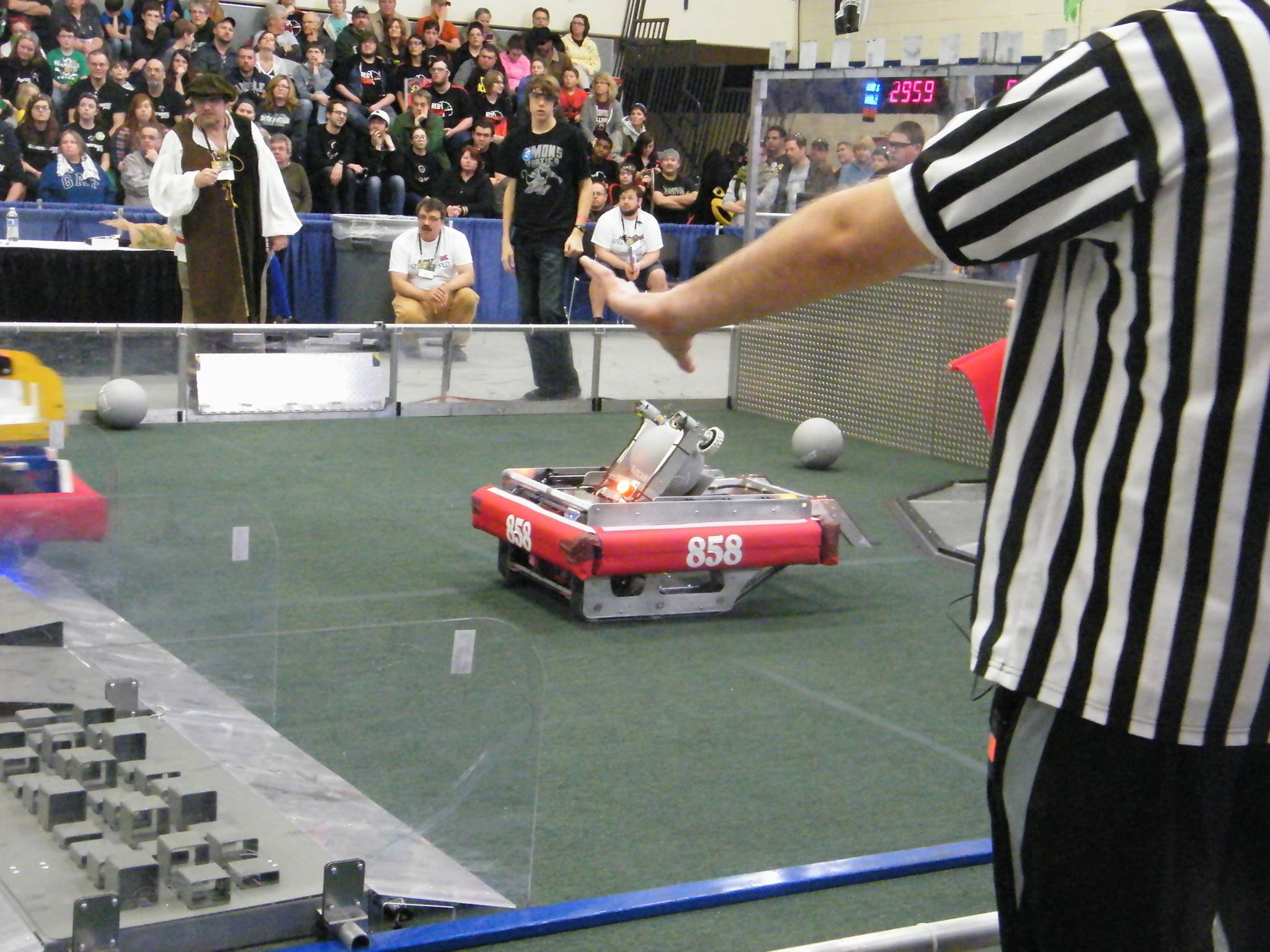
This robot was made to be low profile. Built with tank tread to climb over big humps. Housing a strong soccer ball kicking mechinisem.
| Drive Type | Tank Tred |
| Game Element Effector | Kicker |
| Coded In | Labview (Graphical C++) |

We had to tow a trailer keeping offending allience from scoring. This had a ball dump to release all balls into opponats trailer. We went with crab drive to have more control over the low traction floor.
| Drive Type | Crab Drive (Omni-Directonal Movement) |
| Game Element Effector | Belt System and Ball Dump |
| Coded In | Labview (Graphical C++) |

This robot was designed to nock balls down and race around to pass finish line.
| Drive Type | Crab Drive (Omni-Directonal Movement) |
| Game Element Effector | Elevator |
| Coded In | Labview (Graphical C++) |

This robot was for assisting robots with height.
| Drive Type | 2 Rubber Wheels and 2 Omni-Wheels (For Turning) |
| Game Element Effector | None |
| Coded In | C++ |
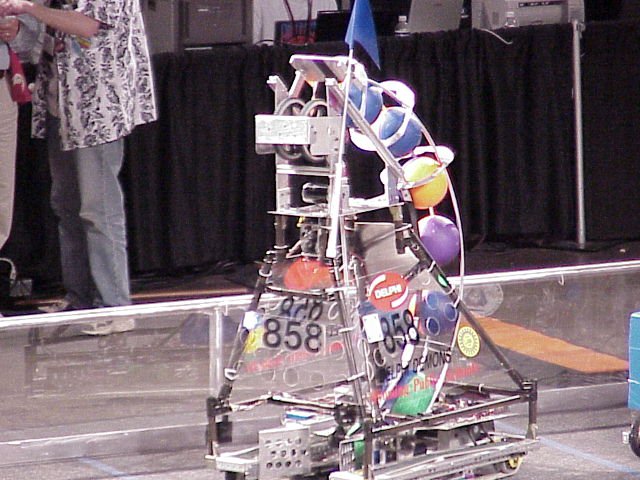
The robot would intake balls and lunch them into the goal.
| Drive Type | Tank Tred |
| Game Element Effector | Belt System and Ball Luncher |
| Coded In | C++ |
This design aimed to carry the trihedral with its elevating arm.
| Drive Type | Rubber Wheel |
| Game Element Effector | Elevator |
| Coded In | C++ |
This robot acted more as a defensive robot. Using arm to remove balls.
| Drive Type | Tank Tred |
| Game Element Effector | 1 Arm |
| Coded In | C++ |
This robot would move a mass amount of boxes to the allience side.
| Drive Type | Tank Tred |
| Game Element Effector | 2 Box Sweepers |
| Coded In | C++ |

This robot was designed to take 2 goals at a time and place them into allience zone.
| Drive Type | Tank Tred |
| Game Element Effector | 2 Arms to Grab Goals |
| Coded In | C++ |